lx16a::LX16A Class Reference
#include <lx16a.hpp>
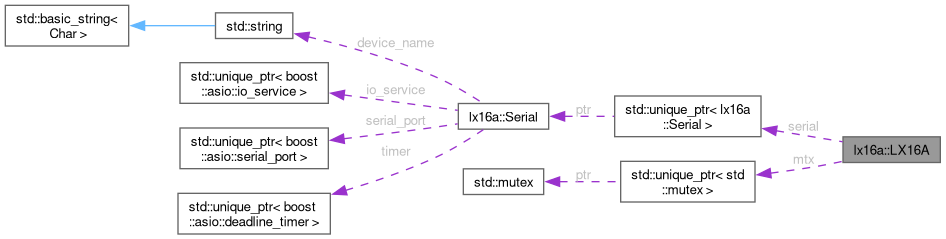
Collaboration diagram for lx16a::LX16A:
Public Member Functions | |
| LX16A (std::string serial_port, unsigned int baud_rate) | |
| uint8_t | lower_byte (int value) |
| uint8_t | higher_byte (int value) |
| uint8_t | word (int low, int high) |
| int | clamp (int range_min, int range_max, int value) |
| uint8_t | get_servo_id (uint8_t servo_id) |
| void | set_servo_id (uint8_t servo_id, uint8_t new_servo_id) |
| void | move (uint8_t servo_id, int position, int time=0) |
| void | move_prepare (uint8_t servo_id, int position, int time=0) |
| void | move_start (uint8_t servo_id=SERVO_ID_ALL) |
| void | move_stop (uint8_t servo_id=SERVO_ID_ALL) |
| std::vector< uint8_t > | get_prepared_move (uint8_t servo_id) |
| int | get_position_offset (uint8_t servo_id) |
| std::vector< uint8_t > | get_position_limits (int8_t servo_id) |
| int | get_position (uint8_t servo_id) |
| void | set_position_offset (uint8_t servo_id, int deviation) |
| void | save_position_offset (uint8_t servo_id) |
| void | set_position_limits (uint8_t servo_id, int min_position, int max_position) |
| std::vector< uint8_t > | get_voltage_limits (uint8_t servo_id) |
| uint8_t | get_voltage (uint8_t servo_id) |
| void | set_voltage_limits (uint8_t servo_id, int min_voltage, int max_voltage) |
| uint8_t | get_max_temperature_limit (uint8_t servo_id) |
| uint8_t | get_temperature (uint8_t servo_id) |
| void | set_max_temperature_limit (uint8_t servo_id, int max_temperature) |
| uint8_t | get_mode (uint8_t servo_id) |
| int | get_motor_speed (uint8_t servo_id) |
| void | set_servo_mode (uint8_t servo_id) |
| void | set_motor_mode (uint8_t servo_id, int speed=0) |
| bool | is_motor_on (uint8_t servo_id) |
| void | motor_on (uint8_t servo_id) |
| void | motor_off (uint8_t servo_id) |
| bool | is_led_on (uint8_t servo_id) |
| void | led_on (uint8_t servo_id) |
| void | led_off (uint8_t servo_id) |
| uint8_t | get_led_errors (uint8_t servo_id) |
| void | set_led_errors (uint8_t servo_id, uint8_t error) |
Private Member Functions | |
| void | send_command (uint8_t servo_id, uint8_t command, std::vector< uint8_t > params) |
| std::vector< uint8_t > | wait_for_response (uint8_t servo_id, uint8_t command) |
| std::vector< uint8_t > | query (uint8_t servo_id, uint8_t command) |
Private Attributes | |
| std::unique_ptr< Serial > | serial |
| std::unique_ptr< std::mutex > | mtx |
Constructor & Destructor Documentation
◆ LX16A()
| LX16A::LX16A | ( | std::string | serial_port, |
| unsigned int | baud_rate ) |
Member Function Documentation
◆ clamp()
| int LX16A::clamp | ( | int | range_min, |
| int | range_max, | ||
| int | value ) |
◆ get_led_errors()
| uint8_t LX16A::get_led_errors | ( | uint8_t | servo_id | ) |
◆ get_max_temperature_limit()
| uint8_t LX16A::get_max_temperature_limit | ( | uint8_t | servo_id | ) |
◆ get_mode()
| uint8_t LX16A::get_mode | ( | uint8_t | servo_id | ) |
◆ get_motor_speed()
| int LX16A::get_motor_speed | ( | uint8_t | servo_id | ) |
◆ get_position()
| int LX16A::get_position | ( | uint8_t | servo_id | ) |
◆ get_position_limits()
| std::vector< uint8_t > LX16A::get_position_limits | ( | int8_t | servo_id | ) |
◆ get_position_offset()
| int LX16A::get_position_offset | ( | uint8_t | servo_id | ) |
◆ get_prepared_move()
| std::vector< uint8_t > LX16A::get_prepared_move | ( | uint8_t | servo_id | ) |
◆ get_servo_id()
| uint8_t LX16A::get_servo_id | ( | uint8_t | servo_id | ) |
◆ get_temperature()
| uint8_t LX16A::get_temperature | ( | uint8_t | servo_id | ) |
◆ get_voltage()
| uint8_t LX16A::get_voltage | ( | uint8_t | servo_id | ) |
◆ get_voltage_limits()
| std::vector< uint8_t > LX16A::get_voltage_limits | ( | uint8_t | servo_id | ) |
◆ higher_byte()
| uint8_t LX16A::higher_byte | ( | int | value | ) |
◆ is_led_on()
| bool LX16A::is_led_on | ( | uint8_t | servo_id | ) |
◆ is_motor_on()
| bool LX16A::is_motor_on | ( | uint8_t | servo_id | ) |
◆ led_off()
| void LX16A::led_off | ( | uint8_t | servo_id | ) |
◆ led_on()
| void LX16A::led_on | ( | uint8_t | servo_id | ) |
◆ lower_byte()
| uint8_t LX16A::lower_byte | ( | int | value | ) |
◆ motor_off()
| void LX16A::motor_off | ( | uint8_t | servo_id | ) |
◆ motor_on()
| void LX16A::motor_on | ( | uint8_t | servo_id | ) |
◆ move()
| void LX16A::move | ( | uint8_t | servo_id, |
| int | position, | ||
| int | time = 0 ) |
◆ move_prepare()
| void LX16A::move_prepare | ( | uint8_t | servo_id, |
| int | position, | ||
| int | time = 0 ) |
◆ move_start()
| void LX16A::move_start | ( | uint8_t | servo_id = SERVO_ID_ALL | ) |
◆ move_stop()
| void LX16A::move_stop | ( | uint8_t | servo_id = SERVO_ID_ALL | ) |
◆ query()
|
private |
◆ save_position_offset()
| void LX16A::save_position_offset | ( | uint8_t | servo_id | ) |
◆ send_command()
|
private |
◆ set_led_errors()
| void LX16A::set_led_errors | ( | uint8_t | servo_id, |
| uint8_t | error ) |
◆ set_max_temperature_limit()
| void LX16A::set_max_temperature_limit | ( | uint8_t | servo_id, |
| int | max_temperature ) |
◆ set_motor_mode()
| void LX16A::set_motor_mode | ( | uint8_t | servo_id, |
| int | speed = 0 ) |
◆ set_position_limits()
| void LX16A::set_position_limits | ( | uint8_t | servo_id, |
| int | min_position, | ||
| int | max_position ) |
◆ set_position_offset()
| void LX16A::set_position_offset | ( | uint8_t | servo_id, |
| int | deviation ) |
◆ set_servo_id()
| void LX16A::set_servo_id | ( | uint8_t | servo_id, |
| uint8_t | new_servo_id ) |
◆ set_servo_mode()
| void LX16A::set_servo_mode | ( | uint8_t | servo_id | ) |
◆ set_voltage_limits()
| void LX16A::set_voltage_limits | ( | uint8_t | servo_id, |
| int | min_voltage, | ||
| int | max_voltage ) |
◆ wait_for_response()
|
private |
◆ word()
| uint8_t LX16A::word | ( | int | low, |
| int | high ) |
Member Data Documentation
◆ mtx
|
private |
◆ serial
|
private |
The documentation for this class was generated from the following files:
Generated by