vel_parser_node.cpp File Reference
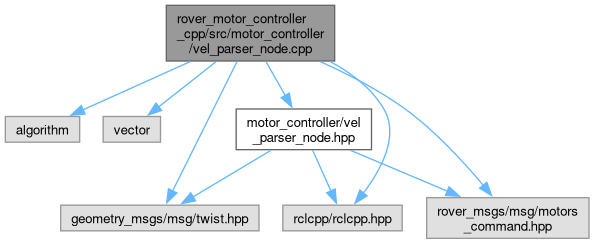
#include <algorithm>#include <vector>#include "geometry_msgs/msg/twist.hpp"#include "rclcpp/rclcpp.hpp"#include "motor_controller/vel_parser_node.hpp"#include "rover_msgs/msg/motors_command.hpp"
Include dependency graph for vel_parser_node.cpp:
Macros | |
| #define | BOOST_BIND_NO_PLACEHOLDERS |
Macro Definition Documentation
◆ BOOST_BIND_NO_PLACEHOLDERS
| #define BOOST_BIND_NO_PLACEHOLDERS |
Generated by